
半自律型的狗型机器人加速月球和火星的探测。不用等待地球的指示,自己分析岩石
狗型机器人在月球和火星无尽的荒野上判断自己的行走并勇往直前。像这样的SF般的景象,想要改变宇宙探索的常识。
“半自主型”的4足步行机器人代替了此前在等待地球指示时只能一步一步前进的探测车,而是自己考虑路线移动到人类指定的目标的“半自主型”4足步行机器人,显示了将调查速度加速到2倍以上的可能性。
瑞士苏黎世理工大学等发表的这项技术,是开创探索“新时代”的关键,它戏剧性地提高了宇宙资源的特定和未知的生命寻找的效率。
该研究成果刊登在《Frontiers in Space Technologies》(2026年3月31日)上。
参考文献:Legged robot could accelerate resource prospecting on the Moon and the search for life on Marshttps://www.eurekalert.org/multimedia/1122340记事共享大家的职位复制评论写评论查看评论导航向上返回机器人消除通信延迟导致的探测停滞现在的火星探测中,存在着无法逾越的“时间之墙”。在火星和地球之间进行通信的话,电波到达单程要花4到22分钟。
由于有这个时滞,地球科学家们无法实时操纵探测车的运动。
因为只能慎重地制定计划,一边确认安全一边进行,所以到目前为止的探测车一天能移动的距离只有几百米左右。
为了打破这种停滞而产生的是人类和机器人分担作用的“半自律型”系统。
如果科学家指示大目标“调查那块岩石”,之后4足步行的犬型机器人就不会一一等待地球的回复,而是自己考虑路线避开障碍物,一个接一个地进行调查。
正是这种自主运动,才是在广阔行星表面高效行走的最大武器。
 <span class="wp-block-imag狗型机器人的安装风景后面是控制室和操作员的图像credit:Dr Tomaso Bontognali。狗型机器人在月球和火星严酷的岩石上奔跑在这次实验中被提拔的是四足行走的狗型机器人“ANYmal”。
<span class="wp-block-imag狗型机器人的安装风景后面是控制室和操作员的图像credit:Dr Tomaso Bontognali。狗型机器人在月球和火星严酷的岩石上奔跑在这次实验中被提拔的是四足行走的狗型机器人“ANYmal”。
到目前为止的探测车是用轮胎前进的,所以在大岩石滚动的地方和陡坡上有抛锚的危险。
但是,如果是有着柔软的脚的ANYmal,即使是凹凸不平的险峻地形也能取得平衡,就像动物一样顺利地跨越。
并且,在该机器人的背部搭载有自由移动的“机器人臂”。
在臂前端,装备有放大岩石放映的显微镜照相机的“MICRO”和能够通过光的散射确定物质成分的“便携式拉曼光谱仪”。
机器人用自己的脚靠近目标岩石,灵巧地伸展手臂,直接接触岩石进行分析。正是“科学家的眼睛和手”与机器人融为一体。
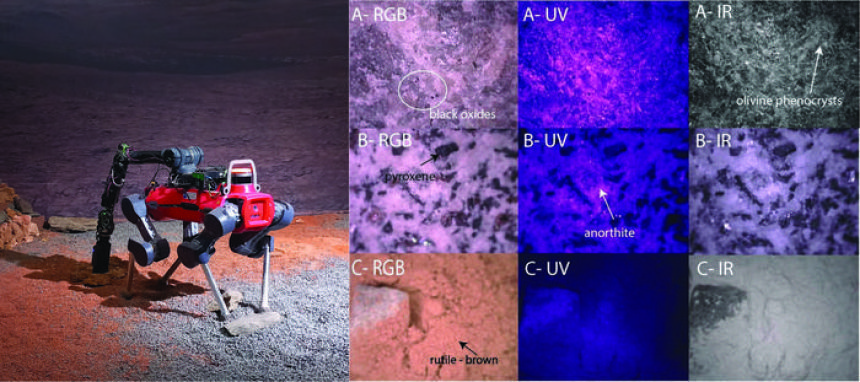 以大尺寸观察该图像(左):使用显微镜照相机“MICRO”和拉曼光谱仪进行岩石自律性测定的机器人。(右):由机器人送来的显微镜照相机(MICRO)拍摄的图像。用可见光(RGB)、紫外线(UV)、红外线(IR)各自的模式捕捉3种月面模拟资料的质感。Image credit:Dr Gabriela Ligeza在模拟环境中的实验证明了以前的2倍以上的调查速度研究小组在位于瑞士巴塞尔大学的名为“火星实验室”的设施中测试了该系统的实力。
以大尺寸观察该图像(左):使用显微镜照相机“MICRO”和拉曼光谱仪进行岩石自律性测定的机器人。(右):由机器人送来的显微镜照相机(MICRO)拍摄的图像。用可见光(RGB)、紫外线(UV)、红外线(IR)各自的模式捕捉3种月面模拟资料的质感。Image credit:Dr Gabriela Ligeza在模拟环境中的实验证明了以前的2倍以上的调查速度研究小组在位于瑞士巴塞尔大学的名为“火星实验室”的设施中测试了该系统的实力。
那里铺满了覆盖行星表面的细小沙尘“乐高松鼠”和真正的岩石,再现了宇宙光的条件。
实验的结果,人类一个一个地发出指示的以往的方法分析花费了41分钟,与此相对,半自主型机器人仅用12分钟到23分钟就完成了相同的作业。
而且不仅仅是快。
机器人成功地分辨出了月球上重要资源的“斜长岩”、能够了解行星内部的“达奈特(Dunite)”、“石膏”、“玄武岩”等科学价值高的岩石。
证明了即使提高速度,调查的质量也不会下降。
 <span class="wp-block-用大尺寸看这个图像的火星地表图像credit:NASA宇宙资源的特定和生命的痕迹寻找效率化如果这种半自主型四足行走机器人实用化,未来的太空探索将比以往更有效率。
<span class="wp-block-用大尺寸看这个图像的火星地表图像credit:NASA宇宙资源的特定和生命的痕迹寻找效率化如果这种半自主型四足行走机器人实用化,未来的太空探索将比以往更有效率。
因为在有限的任务期间内,可以在更大的范围内来回奔波,以前所未有的效率寻找宝贵的资源和曾经可能存在于火星上的生命痕迹“生物签名”。
在今后的宇宙任务中,机敏的机器人们将打头阵扫描地形,只在特别重要的地方立下“记号”。
地球的科学家们将能够看到机器人经过精查的数据,专注于最令人兴奋的发现。
犬型机器人一定会成为人类解开月球和火星之谜的最聪明可靠的伙伴。

